Система управління (СУ) автоматичним завантаженням вапняно-обпалювальної печі
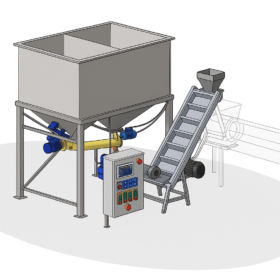
СУ призначена для забезпечення автоматичного і ручного управління виконавчими пристроями, які виконують завантаження вапняно-обпалювальної печі, і контролю параметрів виробництва вапна. Виконавчі пристрої наведені на рисунку 1.

1. Електромотор лебідки скіпового підйомника – 37 кВт.
2. Електромотор приводу заслонки вагового бункера – 2,2 кВт.
3. Електромотор приводу живильника – 2,2 кВт.
4. Електромотор приводу заслонки завантажувального люка печі – 2,2 кВт.
5. Електромотор димососа – 22 кВт.
6. Електромотор приводу конвеєрного транспортера №1 – 2,2 кВт.
7. Електромотор приводу конвеєрного транспортера №2 – 2,2 кВт.
8. Електромотор приводу конвеєрного транспортера №3 – 2,2 кВт.
9. Електромотор приводу конвеєрного транспортера №4 – 2,2 кВт.
Для роботи системи управління завантаженням вапняно-обпалювальної печі і контролю параметрів її роботи повинні бути встановлені датчики положення, датчики температури і датчики розрядження. Розташування датчиків на печі схематично зображено на рис. 2

1. Датчик закриття кришки проміжного бункера печі – 2 шт. (Основний і резервний).
2. Датчик відкриття завантажувального люка печі.
3. Датчик закриття завантажувального люка печі.
4. Датчик розрядження в системі вихлопних газів.
5. Датчик температури відвідних газів.
6. Датчик температури №1 в зоні горіння.
7. Датчик температури №2 в зоні горіння.
8. Датчик температури №3 в зоні горіння.
9. Датчик температури №4 в зоні горіння.
10. Датчик температури №5 під пальниками.
11. Датчик температури №6 під пальниками.
12. Датчик температури №7 під пальниками.
13. Датчик температури №8 під пальниками.
14. Датчик нижнього положення скіпового підйомника (скіп в положенні завантаження).
15. Датчик розрядження в зоні горіння.
16. Датчик відкриття днища вагового бункера.
17. Датчик закриття днища вагового бункера.
18. Силовимірювальний датчик 1.
19. Силовимірювальний датчик 2.
20. Силовимірювальний датчик 3.
21. Силовимірювальний датчик 4.
22. Датчик рівня в печі.
23. Датчик температури №1 в зоні вивантаження.
24. Датчик температури №2 в зоні вивантаження.
25. Датчик температури №3 в зоні вивантаження.
26. Датчик температури №3 в зоні вивантаження.
Алгоритм роботи системи управління завантаженням вапняно-обпалювальної печі в автоматичному режимі:
1. Скіповий підйомник після включення обладнання піднімається вгору (СУ подає команду «скіп вгору») і при наявності в ньому матеріалу вивантажується.
2. Скіповий підйомник при наближенні до проміжного бункера печі за допомогою спеціальних кронштейнів відкриває кришку бункера. Кришка проміжного бункера оснащена двома датчиками закриття (основним і дублюючим поз. 1 на рис. 1). Після надходження сигналу від датчиків про відкриття кришки проміжного бункера відраховується інтервал часу (визначається при налагодженні) і подається сигнал відключення скіпового підйомника.
3. Після зупинки скіпа в верхньому положенні відраховується час вивантаження скіпа (задається при налагодженні, приблизно 2 секунди), і після закінчення цього часу подається команда «скіп вниз».
4. Після закриття кришки проміжного бункера подається команда на відкриття завантажувального люка печі. Положення завантажувального люка контролюється за допомогою датчиків положення поз. 2 і 3 (див. Рис. 1).
5. При досягненні скіповим підйомником датчика нижнього положення (поз. 14 на рис. 2) команда «скіп вниз» вимикається і скіп зупиняється.
6. Після того як скіп зупиниться в нижньому положенні, запускається процес завантаження вагового бункера. Ваговий бункер встановлений на чотири вагових датчика (поз. 18-21 на рис. 1). Його днище оснащено датчиком відкриття і датчиком закриття (поз. 16 і 17 на рис. 1). СУ перевіряє закриття днища (подає команду закрити) вагового бункера. Якщо воно закрите, включається пристрій подачі матеріалу. Вага матеріалу у ваговому бункері безперервно аналізується контролером дозування, і при досягненні заданої дози пристрій подачі вимикається. Облік витрат матеріалу і підрахунок кількості циклів завантаження не ведеться.
7. Після того як доза матеріалу набрана, подається команда відкриття днища вагового бункера. Після повного відкриття днища (контролюється датчиком відкриття) відраховується час вивантаження вагового бункера в скіп і подається команда закриття днища.
8. Після того як скіп завантажений, СУ очікує надходження команди від датчика рівня матеріалу в печі.
9. При надходженні сигналу від датчика рівня подається команда «скіп вгору», після чого скіп починає рух вгору.
10. Далі цикл повторюється з п. 1.

Компанія ТОВ «Константа Вага» виконала проєкт з виготовлення та впровадження системи керування лінією виробництва оцту. Рішення призначене для автоматичного дозування…
...
Вузол точного вагового дозування піску та рубленого пластику, їх змішування за рецептом і подачі в екструдер. Пігмент (сажу) додає…
...
Константа Вага спроєктувала та запустила у виробництво шафу керування для автоматизації випуску комбікорму на базі двох вагових контролерів…
...
У ході участі у проектах з реконструкції системи киснепроводу в міських лікарнях №1 та №3 міста Краматорська, спеціалістами «Константа Вага»…
... Головний офіс:
Головний офіс:  Телефони:
Телефони:  Пошта
Пошта 




